A research team in Hong Kong has developed a mapping technique that enables four-legged robots to negotiate complex terrain without human input, tells IEEE Spectrum. The method builds a multilayer elevation map from LiDAR data, letting the robot perceive its surroundings in a richer, more structured way. Traditional navigation systems struggle when facing mixed obstacles such as gaps, overhangs, and uneven surfaces. The new mapping approach gives the robot enough spatial understanding to choose how to move: crawl under obstacles, leap across gaps, or climb over barriers.
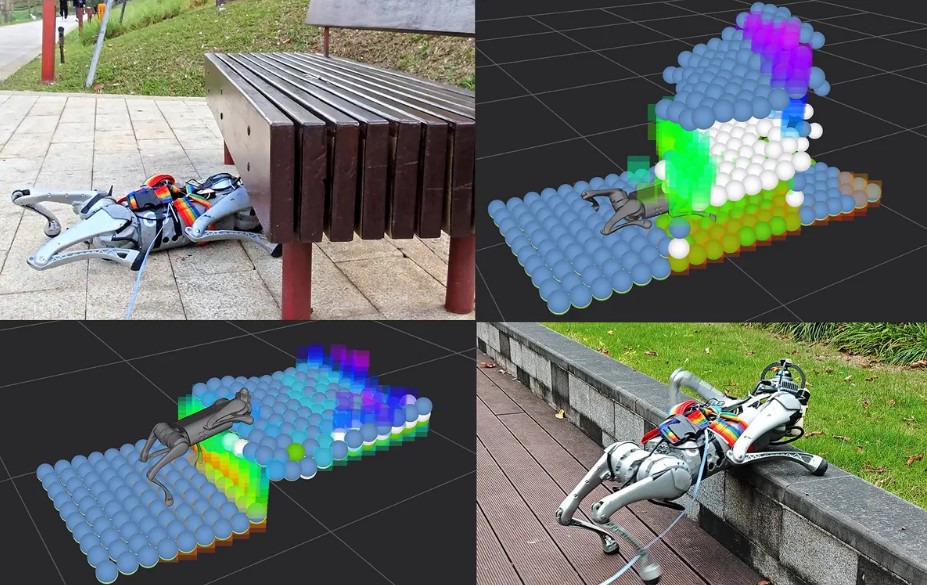
To train the system, the researchers used simulations covering a variety of challenging terrains. When real-world data is incomplete or missing, the robot makes informed estimates based on prior training. In physical tests, they used a Unitree Go1 robot in indoor and outdoor settings. It was able to switch among movement modes autonomously, i.e., crawling, jumping, and climbing, depending on what the terrain demanded. Even though explicit path-planning wasn’t built in, the robot often found alternative routes when direct passage was blocked, effectively combining adaptation and exploration.
Still, the system has limits. The robot’s performance depends heavily on the range of training data it has seen. Unseen obstacle types or terrain layouts may not be handled well. The team plans to incorporate real-world data and explore practical applications, such as inspections in construction or disaster zones.
This work is significant because it pushes robotic navigation closer to animal-like flexibility. Rather than assuming a mostly flat floor, the robot’s mapping and behavior system adapts to complex real environments. As mapping technology matures, such designs may enable robots to tackle search-and-rescue, infrastructure inspection, and exploration tasks that are currently out of reach.