Researchers at the Skolkovo Institute of Science and Technology have developed a new artificial intelligence model that can guide robot navigation using a single 2D image, thereby sidestepping the need for detailed environmental maps and complex planning algorithms, tells Tech Xplore. Traditional robotic navigation often relies on building a comprehensive 3D understanding of the surroundings and then executing computationally expensive planning routines. That process works, but it’s slow and demands extensive hardware and sensor setups. The new model, called SwarmDiffusion, uses a generative diffusion technique to predict both safe trajectories and future motion from a single snapshot of a scene.
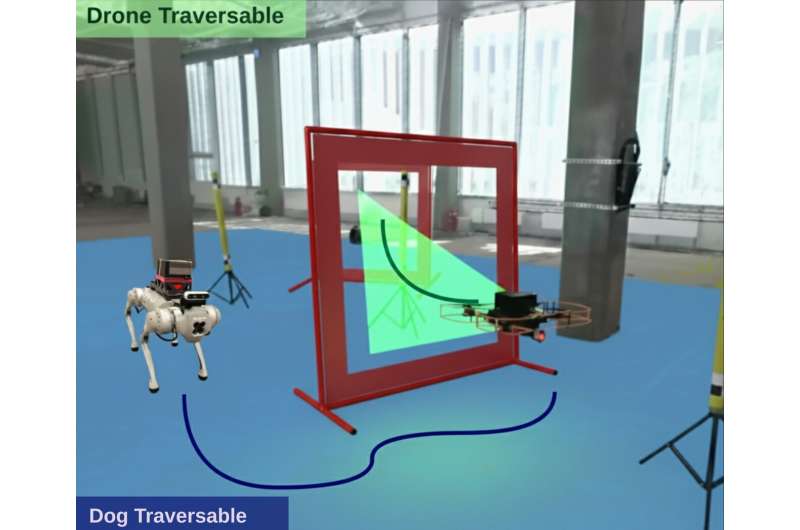
SwarmDiffusion integrates vision-language models that interpret a camera image to identify traversable areas, that is, open spaces where movement is safe, and obstacles such as walls or narrow passages. It then uses a diffusion-based process to generate a feasible path to a target destination, iteratively refining an initial guess into a smooth trajectory that avoids hazards. Because the model reasons directly from visual features rather than building a full spatial map, it runs quickly, generating navigational plans in around 90 milliseconds on a robot’s onboard processor, fast enough for real-time use.
A significant advantage of the SwarmDiffusion approach is its generalizability across robot types. Drones, four-legged robots, and wheeled platforms each have different motion constraints, yet the model can adapt to these differences with minimal platform-specific training. Rather than requiring a huge set of robot-specific datasets for every new platform, SwarmDiffusion needs only a few demonstrations to learn basic motion characteristics and can then infer safe paths from new scenes.
This research points toward more capable, adaptable robots that can move confidently in unfamiliar or dynamic environments without relying on expensive sensors or elaborate pre-built maps. Potential applications include warehouse automation, agricultural robotics, search and rescue missions, and infrastructure inspection. By making navigation more intuitive and less resource-intensive, the new system could broaden the range of tasks autonomous machines can tackle.