Underwater robots are advancing, thanks to designs inspired by nature, but significant obstacles remain before they can match the agility and resilience of real marine life, tells Tech Xplore. A review in npj Robotics highlights progress in robotic systems that mimic the swimming movements of rays and other animals, aiming to improve maneuverability and energy efficiency compared with conventional propeller-driven vehicles. These innovations matter because roughly three-quarters of the ocean floor remains unexplored, and robotic platforms are key to mapping, monitoring, and scientific study where satellites and surface systems cannot reach.
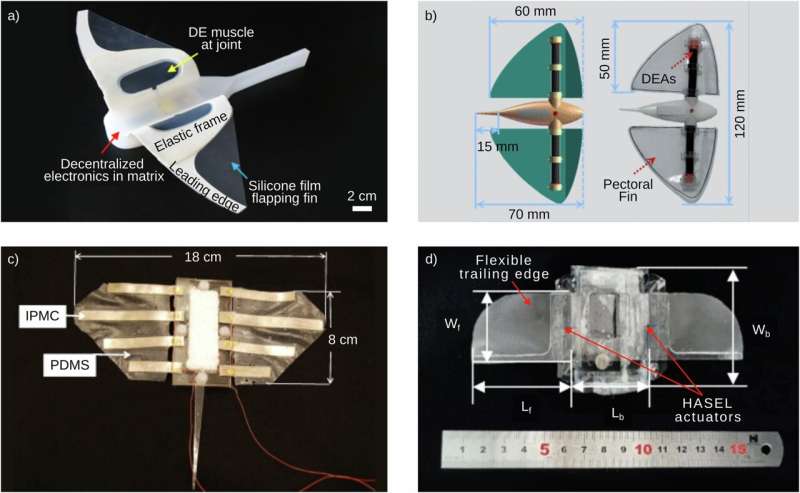
Researchers surveyed 47 ray-inspired robots and identified several classes of actuators. Larger robots tend to use standard electric motors, which offer power but can be heavy and rigid. Smaller designs rely on soft, inflatable elements or smart materials that bend or change shape when stimulated by an electrical signal. At the minimalist end, some experimental robots even use living heart cells to produce flapping motions. Each approach offers trade-offs in strength, flexibility, and complexity of control.
One consistent finding is that robot size strongly influences what actuation method is viable. Micro-robots roughly the size of a coin work well with flexible, low-force materials, while larger models on the scale of dinner plates can harness traditional motors effectively. The mid-sized range remains problematic: actuators that are powerful enough tend to be too stiff or heavy, while softer methods lack the force needed to push through water reliably.
Beyond locomotion, major challenges include developing sensing systems and autonomy so robots can perceive their environment and make navigation decisions without human input. Stability in rough currents and real-world ocean conditions also tests current designs. While bio-inspired concepts are promising, translating them into robust, practical underwater explorers will require advances in materials, control algorithms, and onboard intelligence.
Underwater robotics remains a field where biology guides engineering, but nature’s complexity continues to set a high bar.