Engineers from the University of Sheffield’s School of Electrical and Electronic Engineering present a new soft-robot actuation method called Hysteresis-Assisted Shape Morphing (HasMorph). Rather than fighting hysteresis, which occurs when a mechanical system does not perfectly reverse its path when forces are reversed, the team uses it to afford the robot memory of its previous shape and to enable complex morphology with only two motors.
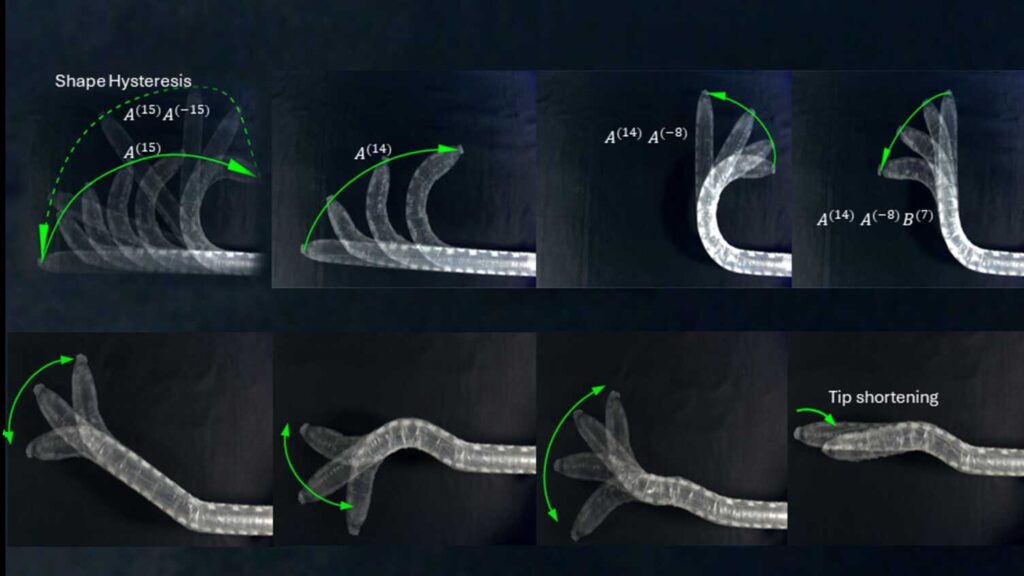
Conventional robotic design often increases actuator count to gain motion dexterity—more motors, more joints, more complexity. The Sheffield approach flips that on its head: by embedding hysteresis into soft robot structure, the system can hold bend states, maintain shape changes, and thereby reduce reliance on multiple actuators. The HasMorph robot uses just two tendons to control multiple bending segments independently, enabling billions of potential configurations.
In addition to shape morphing, the team combined this actuation model with tip-everting soft growing robotics, enabling a robot to extend such as a plant vine, steer around obstacles, retract, and control its growth direction. The implications span minimally invasive medical robots (e.g., endoscopes that navigate inside the body with minimal damage), search-and-rescue bots that squeeze through rubble, and inspection devices for pipelines or infrastructure that require high shape adaptability.
For engineers, the innovation offers several key points: embedding mechanical “memory” in structures via hysteresis, minimizing actuator count, designing for shape adaptability rather than rigid structure, and combining growth with motion.
As robotic systems move into ever more unstructured environments, with constrained spaces, confined passages, or organic terrain, the shift away from brute actuator count and toward mechanical intelligence (using material behaviors like hysteresis) could mark a significant evolution in soft robotics design.