Researchers at Tech Xplore report that smartphone LiDAR systems may soon gain the ability to detect and track objects hidden from direct view. The breakthrough comes from a team at the Massachusetts Institute of Technology, which developed a computational method that transforms consumer-grade LiDAR sensors into simplified non-line-of-sight imaging systems.
LiDAR, short for light detection and ranging, already exists in many premium smartphones to improve depth sensing and augmented reality performance. These systems emit pulses of light and calculate distances by measuring the time it takes for reflected light to return. Traditionally, however, LiDAR can only map objects that remain within a direct line of sight.
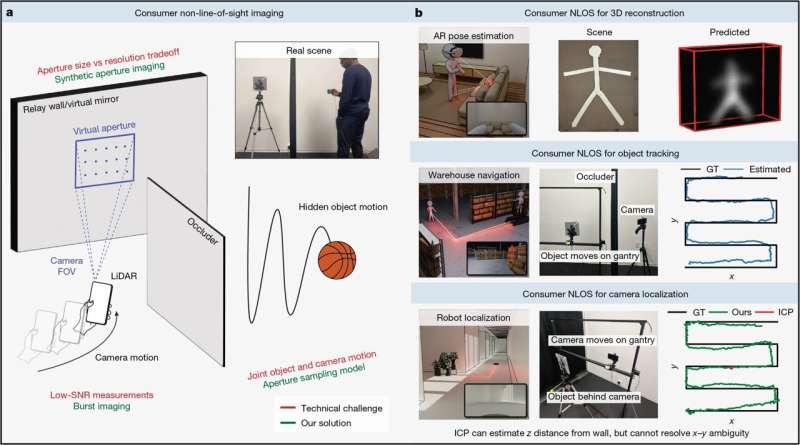
The MIT researchers overcame that limitation by designing an algorithm that preserves and combines extremely weak light reflections that normally would be discarded as noise. Instead of analyzing a single scan, the system gathers faint scattered signals across multiple frames while either the phone or the hidden object moves. By combining information collected from different positions and angles, the algorithm reconstructs the shape and motion of concealed objects.
The research marks a significant shift because non-line-of-sight imaging has historically required expensive laboratory equipment and carefully calibrated environments. In contrast, the new approach works with smartphone-grade hardware costing less than $100 and does not rely on specialized setups. The researchers demonstrated several capabilities, including hidden-object tracking, rough three-dimensional reconstruction, and even localization using concealed objects as reference points.
Despite the excitement, the technology remains limited. The current system does not generate detailed photographic images of hidden scenes. Instead, it reconstructs sparse geometric and motion information derived from very weak reflected signals. Performance also depends on assumptions about consistent object motion and shape between frames.
Still, the implications are substantial. The research could influence robotics, autonomous navigation, wearable devices, industrial sensing, and future augmented reality systems. What once required specialized scientific equipment may eventually become part of everyday mobile hardware.