Researchers at Beijing Institute of Technology developed a navigation architecture that allows robots to operate in unstructured, GPS-denied environments such as caves, collapsed buildings, and dense forests, tells Tech Xplore.
Conventionally, robotic navigation relies heavily on GPS and external sensors for positioning and mapping. But in many real-world settings, these fall short. The team turned to nature for inspiration, combining three biological navigation strategies: an insect-style path integrator, a bird-style multisensory fusion system, and a rodent-style cognitive mapping function.
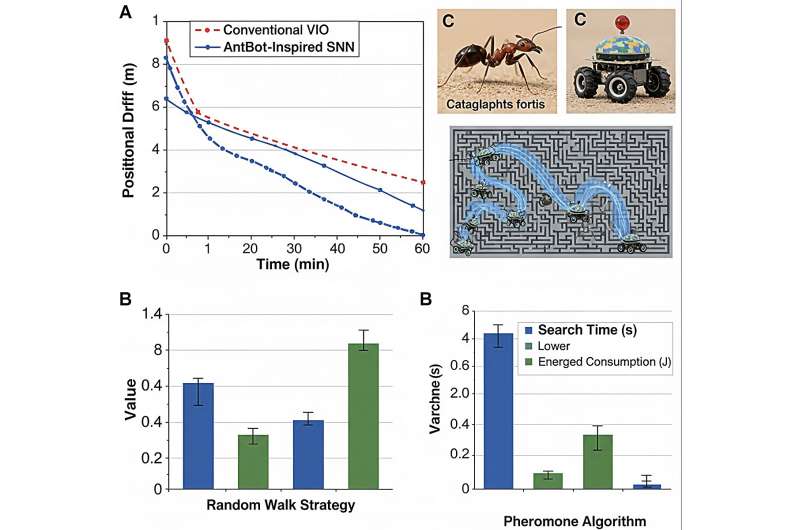
- Insect-inspired path integrator: a low-power spiking neural network tracks motion internally (egocentric tracking) so the robot always knows how far it has travelled.
- Bird-inspired multisensory fusion: mimicking migratory birds, the system fuses inputs from a quantum magnetometer, polarization compass, and vision through a Bayesian filter, ensuring reliable heading even if one sensor fails.
- Rodent-inspired cognitive mapping: akin to a hippocampus, this updates spatial memory only when salient landmarks appear, conserving energy and improving robustness.
Field trials across 23 robotic platforms in tough environments showed impressive improvements: a 41% reduction in positional drift, up to 60% better energy efficiency, and an 83% faster recovery from sensor failure compared with conventional SLAM-based systems.
This research signals a shift: we’re moving beyond incremental improvements in traditional mapping toward systems that integrate robustness, redundancy, and biological principles. The authors envision applications in disaster response, planetary exploration, and any domain where GPS isn’t reliable.
The next steps involve adding on-chip continuous learning (synaptic plasticity) and scaling the map memory to support kilometer-scale navigation, bringing us closer to robots that truly “think” like animals navigating complex terrain.