The rise of robotaxis is often portrayed as a revolutionary development enabled by advances in artificial intelligence, sensors, and autonomous driving software. However, a recent article in Popular Science argues that the underlying idea is far older than many people realize. Today’s autonomous ride-hailing vehicles closely resemble a transportation concept known as Personal Rapid Transit (PRT), which engineers and urban planners have been exploring since the 1950s and 1960s.
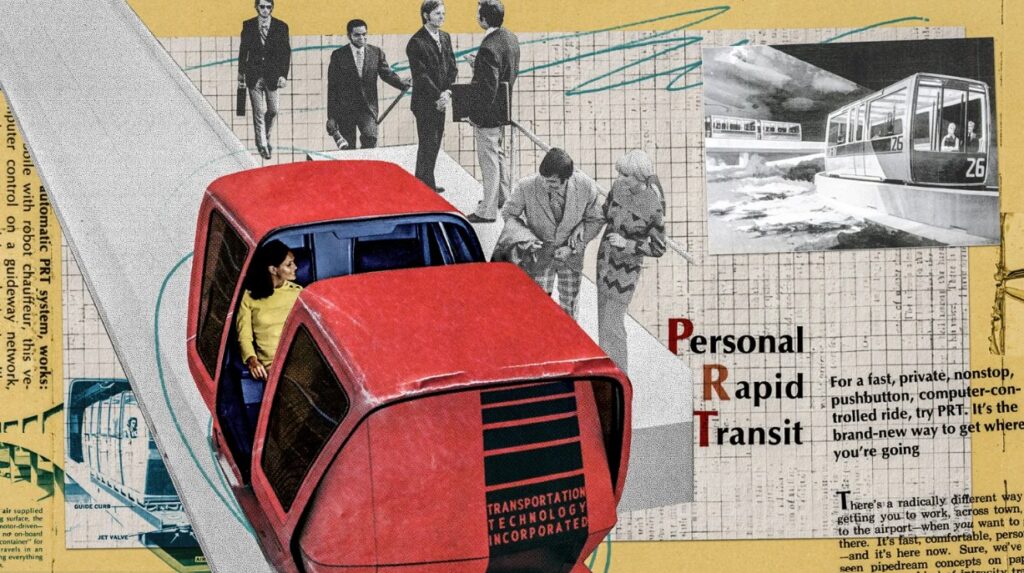
PRT was envisioned as a network of small automated vehicles that would carry passengers directly to their destinations without intermediate stops. Unlike buses or trains operating on fixed schedules, these systems promised on-demand travel, greater privacy, and more efficient routing. Advocates believed PRT could combine the convenience of personal automobiles with the efficiency of public transportation.
Several experimental systems were built over the decades. One of the best-known examples remains the automated transit network at West Virginia University, which has operated since the 1970s. Despite technological promise, most PRT proposals struggled to gain widespread adoption because they required expensive dedicated guideways and substantial infrastructure investments. Urban planners often found the costs difficult to justify compared with conventional transit systems.
Modern robotaxis pursue many of the same goals but take a different approach. Rather than constructing entirely new transportation networks, companies deploy autonomous vehicles on existing roads. This strategy dramatically lowers infrastructure requirements while still offering point-to-point transportation. Advances in computing, machine vision, mapping, and artificial intelligence have made it possible to revisit ideas that earlier generations of engineers could only partially realize.
The article suggests that robotaxis represent an evolution rather than a complete departure from historical transportation thinking. Many of the benefits promised by autonomous ride services, including reduced congestion, improved mobility, and more efficient urban transportation, mirror claims made by PRT advocates decades ago.
By placing robotaxis within a broader historical context, the article highlights a recurring theme in technological development: breakthrough innovations often emerge not from entirely new ideas but from the convergence of mature technologies that finally make long-standing visions practical. The future of autonomous transportation may therefore owe as much to forgotten transit concepts as it does to modern artificial intelligence.