MIT researchers have developed a new memory framework that could significantly improve the way robots understand and navigate the world around them. The system, called Describe Anything, Anywhere, Anytime, at Any Moment (DAAAM), gives robots a form of long-term spatiotemporal memory, enabling them to remember where objects are located, what they look like, and the context in which they were observed. The work was recently presented at the Conference on Computer Vision and Pattern Recognition (CVPR).
The research addresses a longstanding challenge in robotics. While humans can easily recall where they left an item or remember details about a location visited earlier, robots typically struggle to build and access such memories. Existing robotic mapping systems create detailed spatial representations of environments but often lack rich semantic information. At the same time, advanced computer vision models can generate rich descriptions of objects but generally do not connect those descriptions to large-scale spatial maps. DAAAM bridges this gap by combining detailed visual understanding with spatial awareness.
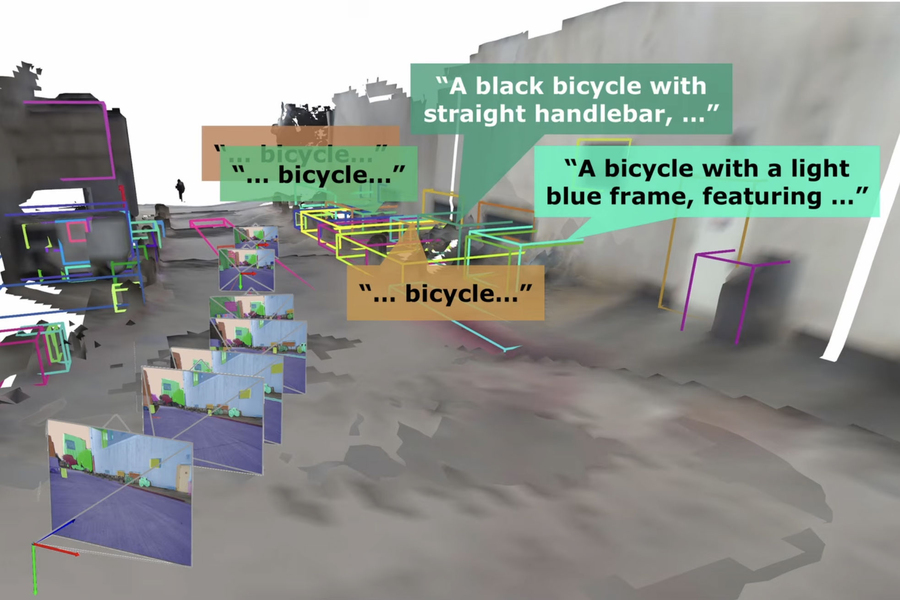
As a robot explores its surroundings, DAAAM generates descriptive information about the objects it encounters and links those descriptions to specific locations within a three-dimensional map. For instance, the system can remember that a red bicycle with a flat tire was parked near a certain building or identify where a particular object was last seen. The framework organizes information into spatial regions, allowing users to retrieve details through natural language questions rather than complex commands.
A major advantage of DAAAM is its efficiency. Instead of analyzing and describing every object continuously, the system selects key visual frames and groups nearby objects for annotation. This strategy reduces computational demands and improves processing speed by roughly an order of magnitude, making real-time operation possible across large environments.
To answer user queries, DAAAM employs a large language model equipped with specialized retrieval tools that help reduce hallucinations and improve accuracy. In testing, the framework outperformed existing methods by 21–53%, depending on the task. Beyond robotics, the researchers see potential applications in augmented reality, facility management, anomaly detection, and navigation systems. The work represents an important step toward robots that can understand, remember, and interact with the physical world in a more human-like way.