Researchers at Massachusetts Institute of Technology and the University of Pennsylvania have developed a new trajectory-planning system that allows autonomous robots to navigate uncertain and hazardous environments more quickly and efficiently. The system, called MIGHTY, is designed to help unpiloted aerial vehicles react to sudden obstacles in milliseconds while maintaining smooth flight paths that reduce travel time, tells MIT News.
The research addresses a major challenge in robotics: enabling autonomous systems to move safely through unpredictable spaces without sacrificing speed or stability. This problem becomes especially critical in disaster-response situations, such as earthquakes or industrial accidents, where robots may need to explore collapsed buildings or dangerous sites that are unsafe for humans. Existing navigation systems often force tradeoffs between rapid obstacle avoidance and smooth trajectory planning, limiting overall performance.
MIGHTY approaches the problem with a new mathematical formulation that reduces computational complexity while ensuring the robot follows a safe and feasible route. Unlike many existing systems that require expensive proprietary software, the open-source platform operates using only the robot’s onboard computer and sensors, making it more accessible for practical deployment.
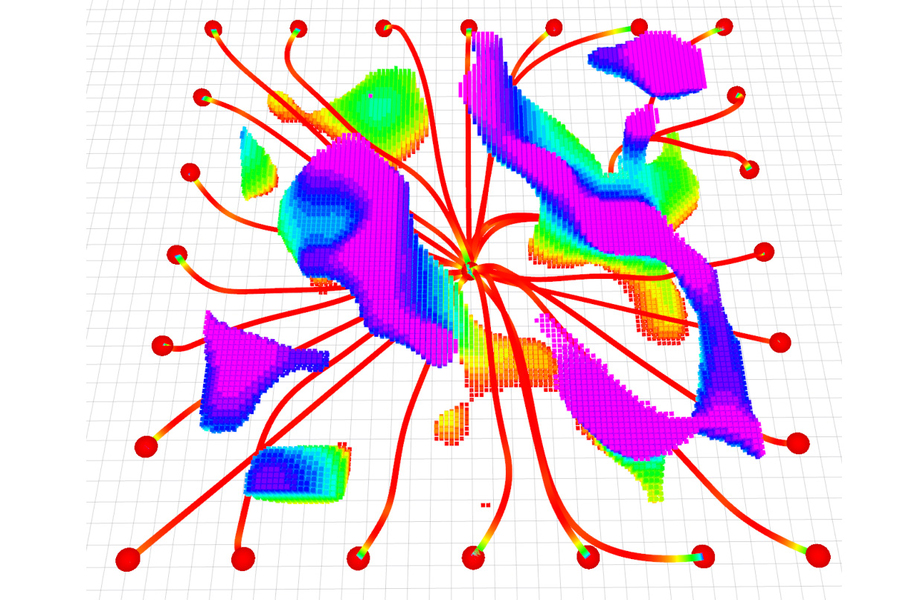
The researchers tested the system in simulated environments where drones navigated around obstacles while traveling toward multiple destinations. Compared with state-of-the-art approaches, MIGHTY required roughly 90% of the computation time while enabling robots to reach destinations approximately 15% faster. The smoother trajectory generation also improved stability and responsiveness during flight.
Lead researcher Taichi Kondo said his interest in autonomous robotics was shaped by the Fukushima Daiichi nuclear disaster following the 2011 Great East Japan Earthquake. Watching workers enter hazardous environments inspired his goal of creating robots capable of entering dangerous spaces instead of exposing humans to risk.
Beyond disaster recovery, the researchers believe MIGHTY could support applications such as last-mile delivery in dense urban areas and industrial inspection of complex infrastructure such as wind turbines. The project reflects broader efforts in robotics to create systems that can operate reliably in dynamic real-world environments without depending on external computing resources.