Researchers at Harvard University’s John A. Paulson School of Engineering and Applied Sciences have developed a multimaterial additive manufacturing technique that embeds actuation and programmable motion into soft robotic components during printing, potentially streamlining fabrication and expanding design freedom in soft robotics, tells 3D Printing Industry Blog.
Traditional soft robotics relies on multi-step fabrication methods such as mold casting and post-print assembly to embed pneumatic channels and functional elements. These approaches are time-consuming and limit the range of shapes and behaviors that can be achieved. Using an additive process called rotational multimaterial 3D printing, the Harvard team overcomes these limitations by depositing multiple materials in a single continuous print with precise control over internal geometry.
The method uses a single rotating nozzle that extrudes both a flexible outer polymer and a fugitive inner material simultaneously. By varying nozzle orientation, rotation speed, and material flow, engineers can define internal channels and patterns that determine how the printed structures deform when pressurized with air. Once printing is complete, the inner material is removed, leaving hollow conduits that serve as built-in actuation pathways.
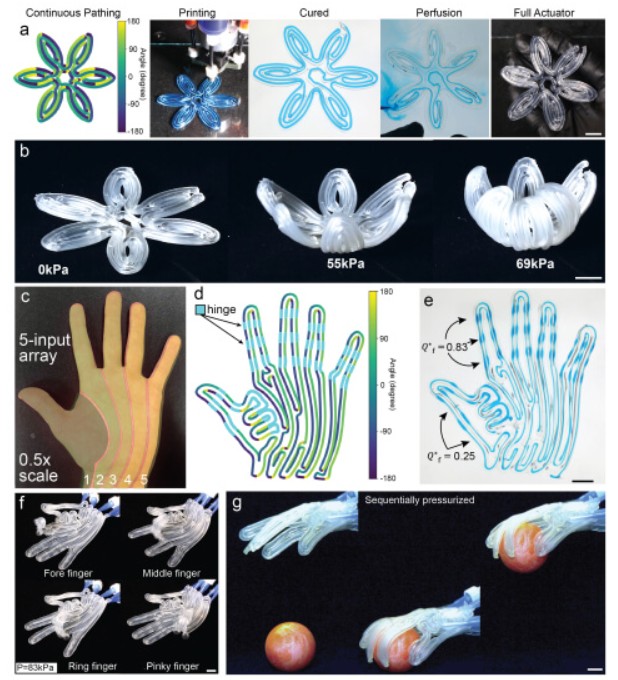
Demonstrations include a spiral actuator that unfurls when inflated and a five-fingered gripper capable of controlled bending and grasping motions. Because these motion patterns are encoded into the print path itself, designers can program predictable deformation into each device without molds or post-assembly.
The research, conducted by graduate student Jackson Wilt and former postdoctoral fellow Natalie Larson in Professor Jennifer Lewis’s lab, is supported by the U.S. National Science Foundation and the Army Research Office’s Multidisciplinary University Research Initiative.
Although the technique shows strong promise for applications ranging from surgical robotics to wearable assistive devices, challenges remain in scaling the process for larger components and ensuring long-term reliability under repeated actuation.