A team at Massachusetts Institute of Technology has developed microscopic soft robots, or “magno-bots,” capable of executing complex movements with a simple external magnet. The research introduces a new fabrication method for creating magnetically responsive microstructures that can deform, grip, and move with high precision, opening new possibilities for soft robotics and biomedical applications.
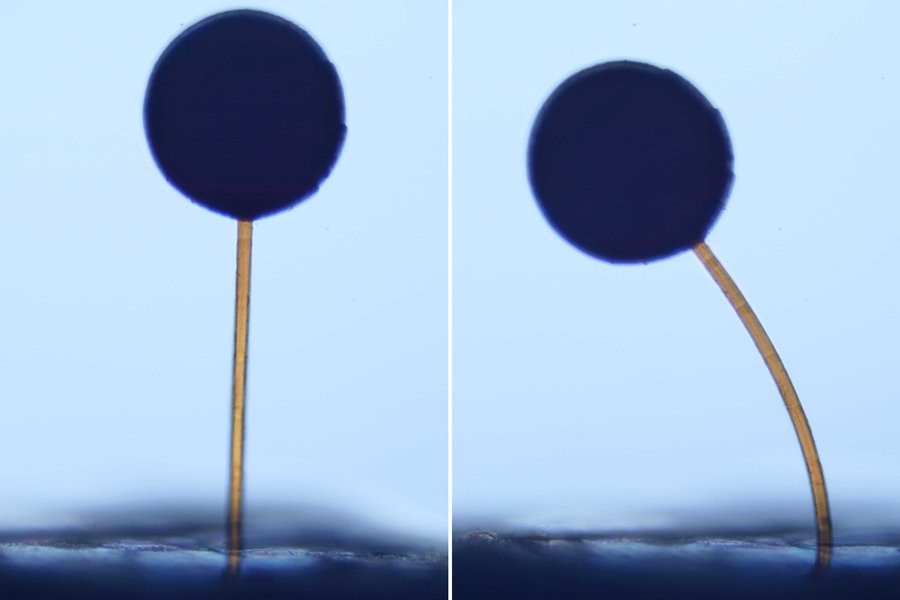
The magno-bots are built from a specially engineered hydrogel infused with magnetic particles. Each structure, often shaped like a tiny “lollipop,” is smaller than a grain of sand. When exposed to a magnetic field, these structures respond instantly, bending, twisting, or snapping together in coordinated ways. In one demonstration, multiple structures form a miniature gripper that closes like a Venus flytrap when a magnet is waved nearby.
What sets this work apart is the ability to create intricate, three-dimensional architectures at the microscale while retaining fine control over how each component responds to magnetism. The researchers achieved this through a two-step fabrication process: first printing a polymer structure using high-resolution techniques, then chemically introducing magnetic nanoparticles into the material. This approach avoids the limitations of traditional methods, where adding magnetic particles directly into printing materials often weakens structural integrity.
The resulting material behaves as a programmable metamaterial, capable of responding rapidly to external magnetic fields without physical contact. This allows precise, remote control of microscopic features, enabling coordinated and complex maneuvers within a single structure.
Potential applications are wide-ranging. In medicine, magno-bots could be used to deliver drugs, perform targeted biopsies, or manipulate tissues in minimally invasive procedures. More broadly, the technology could enable a new class of responsive materials that change shape or function in real time.
The work highlights a shift toward programmable matter at microscopic scales, where structure and material design combine to produce dynamic behavior. By enabling precise control through simple magnetic input, magno-bots represent a significant step forward in the development of soft, adaptive robotic systems.