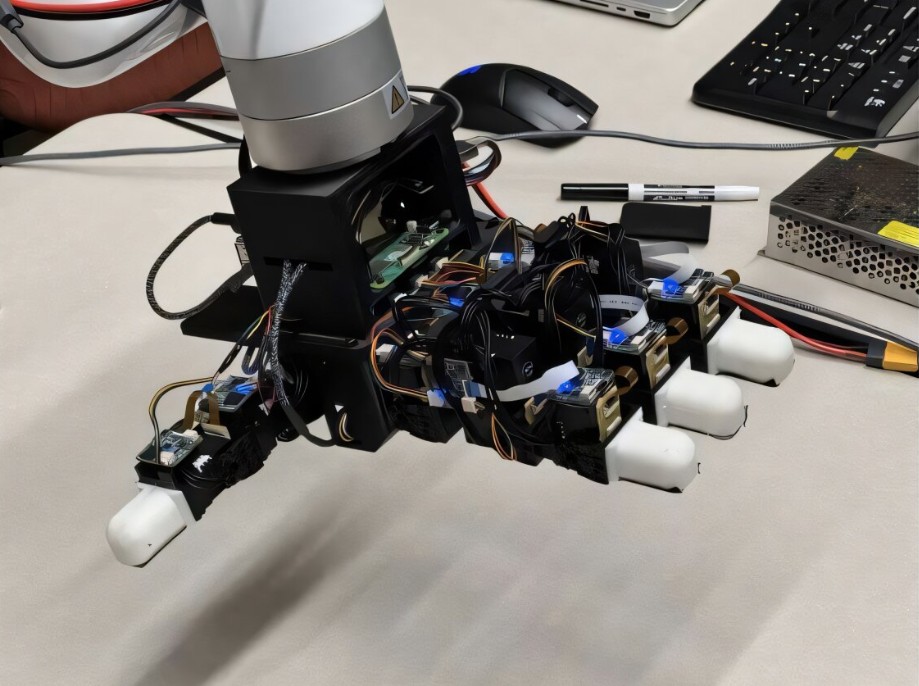
A student team at USC Viterbi, led by Daniel Seita, has developed the MOTIF Hand, a robotic hand that builds on earlier designs by adding human-like sensory features. It’s multimodal, meaning it senses not just motion, but force, temperature, and depth. These allow it to behave more like a human hand: detecting if something’s hot before touching it, judging how hard to push an object, or estimating weight by motion, tells Tech Xplore.
One key advancement is the integration of a thermal camera embedded in the palm. Without contact, the hand can sense things like heat at close range. That helps avoid burn damage and adds safety, especially in tasks involving heat.
For force sensing, in addition to standard sensors, the MOTIF Hand uses inertial measurement unit (IMU) sensors to estimate weight or force by shaking or flicking objects. This mimics how humans sense weight or heft without needing to see or feel every part.
The hand is based on the open-source LEAP Hand from Carnegie Mellon (2023), but improves significantly in its sensory richness. The authors have said they’ll open-source the MOTIF Hand too, making it available as a platform for other researchers to build upon.
Applications could range widely: from factory automation (where handling delicacy, force, and heat matter) to tasks such as cooking or welding where temperature awareness is crucial. The goal is a robotic hand that’s more durable, safer, and better able to handle real-world, complex manipulation.
Challenges remain. While the sensors are more capable, integrating all this into reliable, high-speed robotic control, ensuring robustness, and making it cost-effective are non-trivial. But the MOTIF Hand represents a meaningful step forward toward robotic manipulators that behave with more human-like intuition around force and thermal sensing.