Researchers at the Harvard John A. Paulson School of Engineering and Applied Sciences have developed a mathematical framework that allows engineers to design robotic joints that better match desired force and motion profiles, with potential benefits for robots, assistive devices, and biomechanical applications, tells Tech Xplore. Traditional joints in robotics, that is, bearings or simple hinge mechanisms, often separate the mechanical structure from the task the robot must perform. The new approach embeds task requirements directly into the geometric design of rolling contact joints, a type inspired by biological joints such as the human knee. These joints combine rotation with rolling and gliding motion, providing flexibility, low friction, and high wear resistance compared with conventional designs.
Published in the Proceedings of the National Academy of Sciences, the method simultaneously adjusts the shapes of a joint’s components so that mechanical output, such as force transmission at specific points along a motion path, aligns with what the task demands. Rather than relying solely on software control to compensate for mechanical limitations, this framework ensures that the hardware itself contributes to achieving the performance objective. By tailoring joint geometry mathematically, designers can minimize actuator size and energy use because the mechanics of the joint are already optimized for its job.
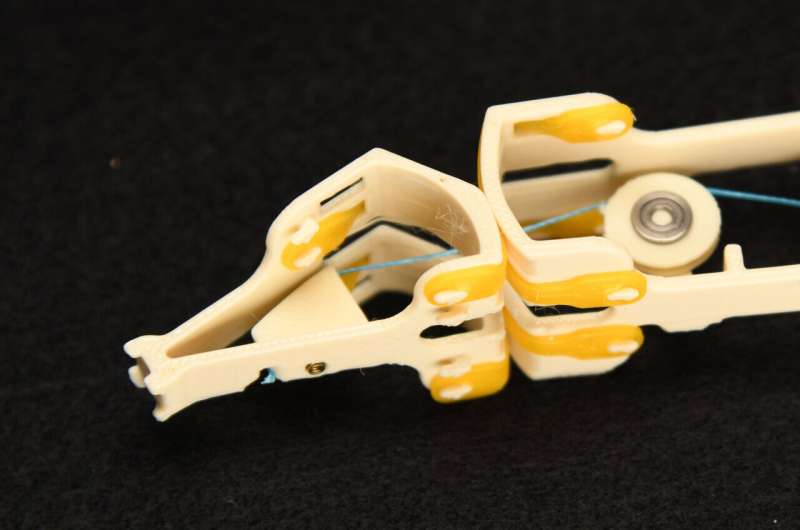
The team demonstrated the concept with two prototypes: a knee-like joint and a two-finger robotic gripper. In the first prototype, the optimized joint mimicked human-like motion, reducing misalignment compared with standard bearing designs. In the gripper, optimized joints boosted the gripping force significantly for the same actuator input. These results show that designing joints around task requirements, rather than default geometries, can lead to robots that move with greater efficiency and capability.
By linking mechanical design with desired performance outcomes, this framework could influence robotic locomotion, manipulation, and assistive robotics in the years ahead, enabling machines that perform more naturally and effectively without heavier or more complex control systems.