Humanoid robots promise versatility, but their energy demands reveal a constraint that current battery technology struggles to meet. Unlike electric vehicles or consumer electronics, these machines combine sustained high power draw with frequent, intense bursts of activity. Tasks such as lifting, balancing, and walking generate hundreds of rapid power spikes during a single charge cycle, placing unusual stress on battery systems.
The Strange Review article notes this pattern differs sharply from other battery-powered devices. Electric vehicles typically operate under steady loads, while power tools experience short, intermittent bursts. Humanoid robots, by contrast, must continuously handle both sustained discharge and sudden transients, often within compact enclosures where heat dissipation is limited. The result is a workload that existing lithium-ion cells were not designed to handle.
A major issue lies in the gap between laboratory specifications and real-world performance. Battery manufacturers often rate cells under controlled conditions with moderate discharge rates and stable temperatures. In operational environments such as warehouses, however, higher discharge rates, frequent cycling, and elevated temperatures significantly accelerate degradation. Expected lifespans can drop from several years to just months under these conditions, undermining the economic viability of large-scale deployments.
The challenge becomes more pronounced when considering deployment intensity. A humanoid robot operating across multiple shifts can cycle its battery hundreds of times annually. Under real-world stress, this rapid cycling compounds wear, creating a mismatch between theoretical durability and practical use.
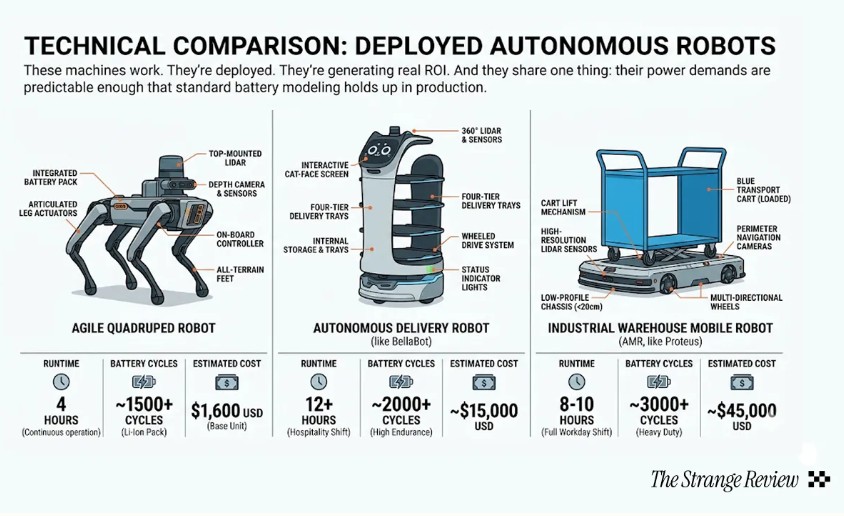
Not all robots face this limitation equally. Wheeled robots, for example, avoid the energy costs associated with balancing and complex motion, allowing them to operate more efficiently. The humanoid form, while flexible and human-compatible, imposes a significant energy penalty that current battery systems struggle to offset.
Addressing this bottleneck will likely require advances beyond incremental improvements in battery chemistry. Potential solutions include redesigned power systems, improved thermal management, or alternative architectures that reduce onboard energy demands. Until then, the “battery wall” stands as a central barrier to scaling humanoid robotics from impressive demonstrations to reliable, everyday tools.