A new class of soft robots is emerging from the intersection of materials science, additive manufacturing, and origami design. In a recent report, researchers at Princeton University developed a robot built almost entirely from printable polymers that can move without traditional motors or external pneumatic systems, tells Tech Xplore.
The system relies on a specialized material known as a liquid crystal elastomer, a polymer whose internal molecular structure can be precisely controlled during fabrication. Using a customized 3D printing process, researchers programmed the orientation of molecules within different regions of the material. This allowed them to create zones that respond predictably when heated, effectively embedding motion into the structure itself.
Origami principles play a central role in the design. By arranging the printed material into foldable patterns, the team created hinges that bend in specific ways when activated. These folds are not passive; they are engineered to respond dynamically, enabling the robot to change shape and perform repeated movements.
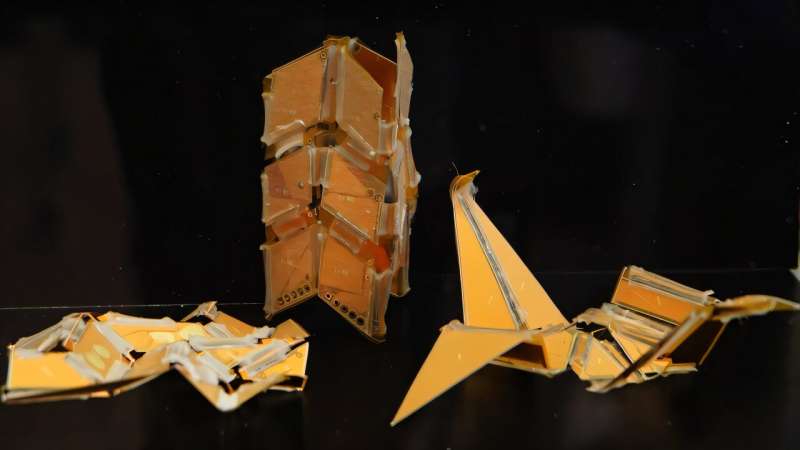
To demonstrate the concept, the researchers built a crane-shaped robot that flaps its wings when powered by an electric current. Instead of relying on mechanical actuators, the motion is driven by localized heating generated through embedded electronics. As certain regions heat up, the polymer contracts, triggering controlled folding and movement.
One of the key advantages of this approach is durability and programmability. The robot can perform repeated motion cycles without significant wear and can be controlled through real-time electrical inputs. This opens the door to reconfigurable systems that can adapt their behavior without requiring complex mechanical assemblies.
The research highlights a broader shift toward integrating structure, material, and actuation into a single system. By eliminating motors and reducing mechanical complexity, such designs could lead to lighter, more efficient robots capable of operating in constrained or sensitive environments, including biomedical applications and hazardous settings.












{kind=link}